 Anmelden
AnmeldenWenn wir über
Elektronische Navigation
sprechen, werden die meisten von Euch das Bild eines Navigationssystems vor den Augen haben, wie es heute auch in unseren Autos Einzug gehalten hat. Dieses Bild ist nicht verkehrt. Es stellt lediglich die Spitze des Eisberges dar.
Die elektronische Navigation, wie wir sie heute kennen, nahm ihren Ursprung zu Zeiten des 2. Weltkrieges. Damals war es vor allem eine militärische Anforderung, Schiffe und vor allem Flugzeuge sicher an einen bestimmten Ort der Welt und dann auch wieder nach Hause zu lotsen. Hierbei wurden jeweils sehr große Distanzen zurückgelegt, so dass die auf Sichtnavigation basierten Methoden der terrestrischen Navigation nicht angewandt werden konnten.
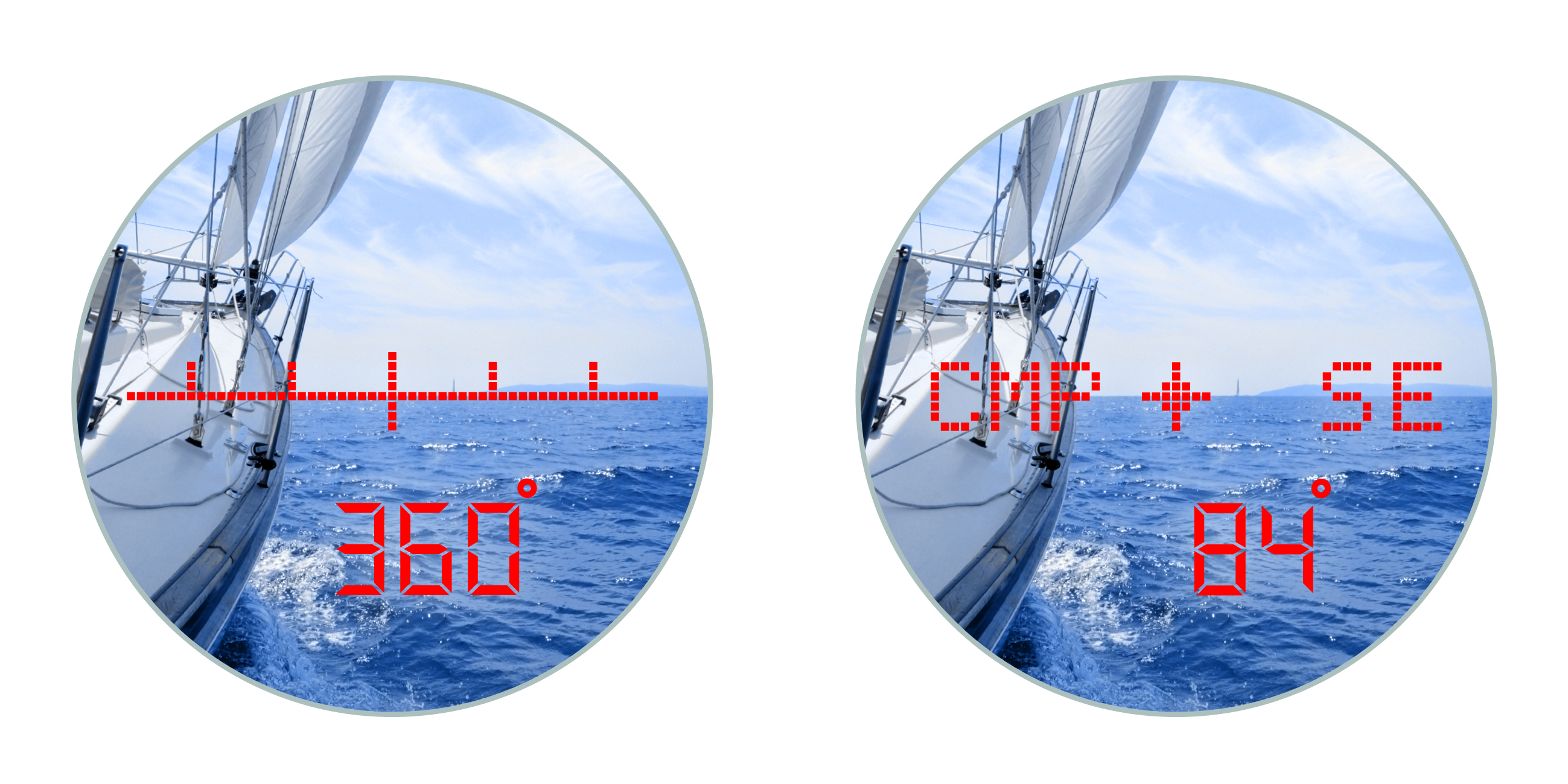
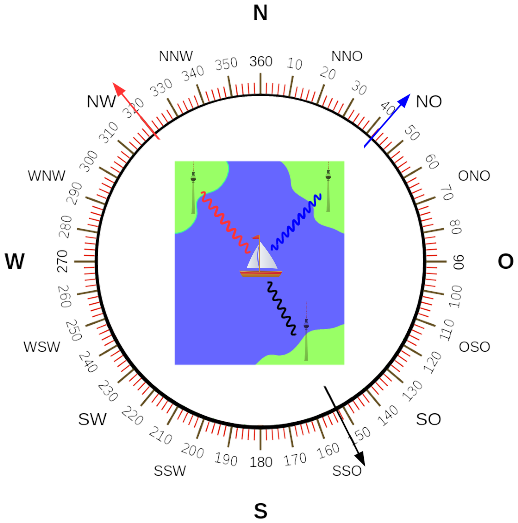 Das Bindeglied zwischen der terrestrischen und der elektronischen Navigation schlagen Richtfunk-Peilsender und -Empfänger. Fest an Land befinden sich Peilfunksender, die anhand einer Kennung identifiziert werden können.
Das Bindeglied zwischen der terrestrischen und der elektronischen Navigation schlagen Richtfunk-Peilsender und -Empfänger. Fest an Land befinden sich Peilfunksender, die anhand einer Kennung identifiziert werden können.
Da Frequenzbereiche gewählt werden, die sich im Langwellenbereich befinden, spielt die Erdkrümmung nur eine untergeordnete Rolle und die Entfernung zwischen Schiff und Peilfunksender kann sehr groß werden. Die exakten Standorte dieser Sender sind bekannt. Sie können mit elektronischen Hilfsmitteln gepeilt werden. So wie bei der magnetischen Peilung, müssen auch elektronische Peilungen beschickt werden.
Es entstehen Standlinien auf Basis von Richtungswinkeln, die der Kreuzpeilung sehr ähnlich sind. Man spricht in diesem Fall auch von Angulation, beziehungsweise von Triangulation, da drei Messungen für eine exakte Ortsbestimmung mit Höhe notwendig sind. Im Detail gehen wir hierauf aber in der Rubrik terrestrische Navigation ein.
Triangulation
wird die Methode genannt, eine Position aus der Beobachtung von 3 Richtungen, bzw. Winkeln (englisch: angle) zwischen rechtweisend Nord und bekannten Landmarken, zu bestimmen.
Bei der Funkpeilung werden die Richtungen zu bekannten Funkfeuern gemessen. Wie bei der Kreuzpeilung ergeben sich Standlinien, die sich in einem Fehlerdreieck kreuzen.




Die elektronische Navigation kann man in zwei wesentliche Rubriken unterteilen:
Im Nahbereich
unterstützen elektronische Navigationshilfen das Erkennen von Revierbeschaffenheiten und von anderen Verkehrsteilnehmern. Letzteres ist aus Sicht der Navigation aber ein zusätzliches Leistungsmerkmal, das eher der Seemannschaft oder dem Seerecht zuzuordnen wäre.
Radar nutzt die Reflexion elektromagnetischer Wellen um auf eine Entfernung, die das blose Auge – auch mit Fernglas – nicht mehr abdeckt, Küstenlinien zu visualisieren.
Sonar und Echolot hingegen nutzen die Reflexion von Schallwellen, um unter Wasser die Beschaffenheit des Meeres- oder Seebodens unter oder vor dem Schiff darzustellen.
Im Fernbereich
werden Funksignale fester Sender empfangen und ausgewertet. Im Gegensatz zur bei der Funkpeilung angewandten Triangulation, kommt hier aber die Trilateration zum Einsatz. Hierbei werden nicht die Richtungen zu den Sendern, sondern die Entfernungen von den Sendern ausgewertet. Genauer noch: Gemessen werden die Entfernungsdifferenzen zu je zwei Sendern. Hierbei kommen zwei unterschiedliche Messverfahren in Frage:
 Die Feldstärke der ausgesendeten Signale nimmt reziprok zur Entfernung vom Sender ab:
Die Feldstärke der ausgesendeten Signale nimmt reziprok zur Entfernung vom Sender ab:
E ~ 1/d
Damit könnte aus der Signalstärke des empfangenen Signals die Entfernung zum Sender berechnet werden, wenn die Sendeleistung bekannt ist. Problematisch an diesem Verfahren ist, dass Dämpfungen beim Sender, auf der Übertragungsstrecke und beim Empfänger das Messergebnis verfälschen können.
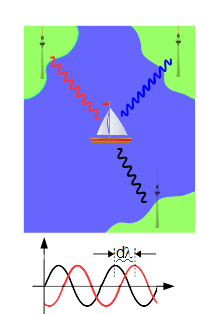
Bei der Phasendifferenz-Messung senden alle Sender ein synchrones Sinus-Signal aus. Da die Übertragungsgeschwindigkeit von allen Sendern zum Empfänger gleich ist, werden diese Sinussignale entsprechend der Entfernung zum Sender phasenverschoben empfangen. Aus der Phasendifferenz dλ kann die Entfernungsdifferenz zwischen den beiden Sendern berechnet werden.
Die Sender für die elektronischen Navigationssysteme stehen entweder auf der Erdoberfläche (OMEGA, ALPHA, DECCA, LORAN, CHAYKA) oder befinden sich auf Satelliten (GPS, GALLILEO, GLONASS, BEIDOU). Das Prinzip der Phasendifferenz-Messung bleibt hiervon unberührt.
Die Standlinien werden bestimmt durch alle Orte auf der Erdoberfläche 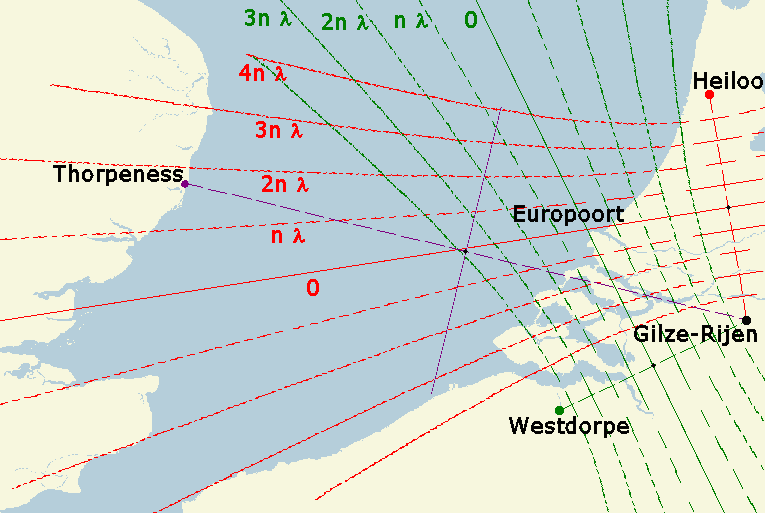 (nautische Anwendung), bei denen die Entfernungs-Differenzen zu zwei Sendern gleich bleiben. Sie haben die Form von Hyperbeln. Diese Art der Navigation wird daher auch Hyperbel-Navigation genannt. Der Standort ergibt sich, wie gehabt, durch den Schnittpunkt zweier Standlinien. Aus diesem Grund sind mindestens 3 Signale von unterschiedlichen Sendern einer Kette notwendig, um einen möglichen Standort zu ermitteln.
(nautische Anwendung), bei denen die Entfernungs-Differenzen zu zwei Sendern gleich bleiben. Sie haben die Form von Hyperbeln. Diese Art der Navigation wird daher auch Hyperbel-Navigation genannt. Der Standort ergibt sich, wie gehabt, durch den Schnittpunkt zweier Standlinien. Aus diesem Grund sind mindestens 3 Signale von unterschiedlichen Sendern einer Kette notwendig, um einen möglichen Standort zu ermitteln.
Moderne GPS-Empfänger berechnen den Standort vollautomatisch. Dies war früher, aufgrund der geringeren Rechenleistung der Empfänger, nicht möglich. Für die 57 DECCA Ketten sind aus diesem Grund Hyperbel-Karten herausgegeben worden.
Das könnte Dich auch interessieren

Trilateration
Bei dieser Methode zur Ortsbestimmung wird die Differenz der Entfernung Deines Schiffes zu zwei Funkfeuern gemessen.
Die Empfangsfeldstärke scheidet aufgrund der nicht handhabbaren Dämpfungsfehler aus. Angewandt wird die Phasendifferenz-Messung.
- Alle Sender einer Kette senden ein synchrones Signal aus.
- Das Signal bewegt sich mit derselben Geschwindigkeit von allen Funkfeuern zu Deinem Schiff
- Aufgrund der unterschiedlichen Entfernungen kommt es zu unterschiedlichen Zeitpunkten an.
- Die Zeitdifferenz schlägt sich in der Phasenverschiebung dλ nieder.
- Alle Orte mit der gleichen Phasenverschiebung dλ liegen auf einer Standlinie, die die Form einer Hyperbel hat.
Man nennt diese Art der Navigation deshalb auch Hyperbel-Navigation. Der Standort ergibt sich wieder aus der Kreuzung mindestens zweier Standlinien.
Für die 57 DECCA Ketten wurden zur einfacheren Handhabung Hyperbelkarten herausgegeben.
Bleib bei uns: Wir erklären die Land- und Satelliten-gestützten Verfahren genauer.